Hookův zákon

Hookův zákon (též Hookeův zákon) popisuje pružnou deformaci materiálu působením síly, za předpokladu malých sil a malých deformací, které po odlehčení zmizí. Lze jej formulovat např. ve tvaru:
- Normálové napětí je přímo úměrné relativnímu prodloužení.
Hookův zákon v tomto tvaru bývá také označován jako elementární Hookův zákon.
Hookův zákon platí pouze pro dokonale pružná (elastické) přetvoření, která navíc mají lineární závislost mezi napětím a deformací. Jelikož u reálných materiálů vždy dojde k překročení meze kluzu, případně meze porušení, je možno uvažovat s Hookovým zákonem pouze do tzv. meze úměrnosti. Za mezí kluzu je nutné uvažovat s teorií plasticity, pro viskózní materiály platí Hookův zákon pouze pro krátkodobá zatížení.
Hookův zákon je pojmenován po britském fyzikovi Robertu Hookovi, který tento zákon poprvé zapsal jako latinský anagram Ceiiinosssttuv. Roku 1676 ho formuloval latinsky jako:
| „ | Ut tensio, sic vis. | “ |
Tah a tlak
Podrobnější informace naleznete v článku Hookův zákon pro tah.
Hookův zákon pro tah a tlak lze (pro malá napětí a malé deformace) vyjádřit ve tvaru
- ,

kde je poměrné délkové prodloužení (přičemž označuje délku vzorku), je modul pružnosti v tahu (Youngův modul), je mechanické napětí.




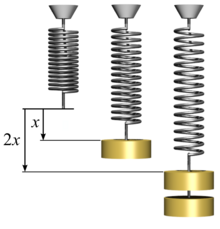
Lze se také setkat se zápisem , kde je působící síla, konstanta pružnosti materiálu a prodloužení materiálu.




Smyk
Podrobnější informace naleznete v článku Hookův zákon pro smyk.
Hookův zákon pro smyk lze (pro malá napětí a malé deformace) vyjádřit ve tvaru
- ,

kde je úhel smyku, je tečné napětí a je modul pružnosti ve smyku.




Hookův zákon při obecné napjatosti
Hookův zákon při obecné (tříosé) napjatosti trojrozměrného tělesa má následný tvar:
![{\displaystyle \varepsilon _{x}={\frac {1}{E}}\cdot {\bigg [}\sigma _{x}-\nu (\sigma _{y}+\sigma _{z}){\bigg ]}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/b84704ff470094544639da0cc16322789cdcbd0b)
![{\displaystyle \varepsilon _{y}={\frac {1}{E}}\cdot {\bigg [}\sigma _{y}-\nu (\sigma _{x}+\sigma _{z}){\bigg ]}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/5ba57048fe39618ca8a1afd9dec63ef39f56d95b)
![{\displaystyle \varepsilon _{z}={\frac {1}{E}}\cdot {\bigg [}\sigma _{z}-\nu (\sigma _{x}+\sigma _{y}){\bigg ]}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/08dcf678b877b118c93ca2b2cb282ad5e00db03a)



Přetvoření jsou závislá na normálových napětích , Youngovu modulu pružnosti a Poissonově čísle (někdy také označovaném ). Jednotlivé indexy se střídají na principu cyklické záměny. Smyková přetvoření (zkosení) jsou závislá pouze na příslušném smykovém napětí () a modulu pružnosti ve smyku .






Obecný tvar Hookova zákona
Lineární vztah mezi napětím a deformací, známý z elementárního Hookova zákona pro tah nebo smyk, lze (s použitím Einsteinova sumačního pravidla) zobecnit na lineární vztah mezi tenzorem napětí a tenzorem deformací
- ,

kde jsou složky tenzoru napětí, jsou složky tenzoru malých deformací a koeficienty vystihují vlastnosti látky (bývají označovány jako elastické koeficienty). Uvedený vztah představuje obecný tvar Hookova zákona.



Koeficienty jsou složkami tenzoru čtvrtého řádu. Počet nezávislých složek tenzoru se v důsledku symetrie tenzorů a snižuje na 21. Takový počet elastických koeficientů je nutný pro popis chování krystalů trojklonné soustavy, tedy soustavy s nejmenší symetrií. Pro popis krystalových soustav s vyšší symetrií postačuje menší počet elastických koeficientů.
Zobecněný Hookův zákon
K popisu izotropního tělesa postačují dva nezávislé elastické koeficienty. Pro teoretické výpočty jsou voleny tzv. Laméovy (elastické) koeficienty a , pro praktické účely jsou spíše užívány Youngův modul (modul pružnosti v tahu) a modul pružnosti ve smyku . Modul pružnosti ve smyku je totožný s Laméovým koeficientem . Pomocí Laméových koeficientů získá obecné vyjádření Hookeova zákona pro izotropní těleso tvar

- ,

kde je stopa tenzoru malých deformací a je Kroneckerovo delta. Tato rovnice, která je platná pro izotropní látku, se označuje jako zobecněný Hookův zákon.


Jsou-li elastické vlastnosti látky popsány moduly a , lze zobecněný Hookův zákon vyjádřit jako

Označíme-li stopu tenzoru napětí jako , pak platí


Po dosazení do předchozích vztahů získáme vyjádření závislosti na , tzn.


popř.

Odkazy
Literatura
- Encyklopedie fyziky, Martin Macháček, Praha, Mladá fronta 1995
Související články
- pružnost
- pevnost (fyzika)
- trhací zkouška
Externí odkazy
 Obrázky, zvuky či videa k tématu Hookeův zákon na Wikimedia Commons
Obrázky, zvuky či videa k tématu Hookeův zákon na Wikimedia Commons
| Autoritní data |
|
|---|
Portály: Fyzika










