 | この項目では、数学理論としてのベクトル解析について説明しています。1901年にエドウィン・ビッドウェル・ウィルソンとウィラード・ギブスによって出版されたベクトル解析に関する著作『Vector Analysis』については「ベクトル解析 (著書)」をご覧ください。 |
| 下記テーマに関する記事の一部 |
| 解析学 |
|---|
 |
| |
| |
| |
| |
| |
| |
| |
| |
|
ベクトル解析(ベクトルかいせき、英語:vector calculus)は空間上のベクトル場やテンソル場に関する微積分に関する数学の分野である。
多くの物理現象はベクトル場やテンソル場として記述されるため、ベクトル解析は物理学の様々な分野に応用を持つ。
物理学では3次元ユークリッド空間上のベクトル解析が特によく用いられるが、ベクトル解析は一般のn次元多様体上で展開できる。
3次元ユークリッド空間におけるベクトル解析
ベクトル場とスカラー場
定義
3次元ユークリッド空間 上のベクトル場Xとは、上の各点Pに対し、Pを始点とする3次元ベクトルX(P)を対応させる写像のことである。
上のベクトル場Xとは、上の各点Pに対し、Pを始点とする3次元ベクトルX(P)を対応させる写像のことである。
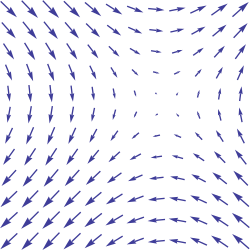 ベクトル場の例(2次元の場合)
ベクトル場の例(2次元の場合) 本項では特に断りのない限り、この写像がPに関して滑らかな場合を考える。すなわち、の座標を使って

と表したとき、各Xi(x1,x2,x3)が任意回微分可能である場合を考える。
なお、ベクトル場の記法としてX(P)の代わりに

のように Pを下付きに書くことも多い。しかしこの下付きの記法だと、成分表記したときに煩雑になるので、本項ではX(P)とXPの両方の記法を混用する。
同様に3次元ユークリッド空間上のスカラー場Fとは、上の各点Pに対し、実数F(P)を対応させる写像のことである。
具体例
ベクトル場の例としては、電場、磁場、重力場などがある。また流体上の各点にその点での粒子の速度ベクトルを対応させることで速度場を定義する事もできる。
スカラー場の線積分
定義
Xをベクトル場とし、 ユークリッド空間上の曲線Cが 、u∈[a,b]とパラメーター表示されているとする。積分
、u∈[a,b]とパラメーター表示されているとする。積分

を曲線Cに沿ったスカラー場Fの線積分という。
線積分の定義はCとその向き付けには依存するが、同じ向き付けを与える限りパラメーターの取り方に依存しない。実際曲線Cを別のパラメーターwに  、w∈[c,d]と変数変換して同様の積分
、w∈[c,d]と変数変換して同様の積分

を考えると、この変数変換が曲線の向きを変えないとき、すなわち

が恒等的に言えるときには

が成立する。
そこで線素dsを

と定義し、スカラー場の線積分を

と表記する。
Cの始点と終点が一致するとき(すなわちCが閉曲線のとき)はそのことを強調して

とも表記する。
弧長
線積分の特殊なケースとして

を考えると、曲線Cの長さ(弧長)に一致する事が知られている。
厳密な証明は弧長の項目にゆずるが、直観的には以下の理由による。Cを、u∈[a,b] と向きをはじめとする保つようにパラメトライズし、[a,b]を長さΔuの微小区間に分けると、Cの長さはおよそ


なので、Δuを0に近づけると、線積分

に一致する。従って上述の線積分で弧長を求める事ができる。
弧長パラメーター
曲線Cを、
- x(s)=(Cの始点からs離れた位置)
とパラメトライズできる[注 1]。このようなsをCの弧長パラメーターという。 Cを弧長パラメーターで と表したとき、定義より
と表したとき、定義より

なので、両辺を微分すると、

が恒等的に成り立つ。
従って線積分とは、

より、弧長でパラメトライズされた場合のF(x(s))の積分である。
ベクトル場の線積分
定義
Xをベクトル場とし、 ユークリッド空間上の曲線Cが、u∈[a,b]とパラメーター表示されているとし、積分

を考える。ここで「・」は内積である。
スカラー場に対する線積分と同様の議論で、上述の積分はベクトル場Xと曲線Cのみに依存し、Cのパラメトライズの方法によらない。そこで上述の積分を

と表記し、ベクトル場Xの曲線Cに沿った線積分という。ここで

である。成分で書けば、線積分は

とも表示できる。
Cの始点と終点が一致するとき(すなわちCが閉曲線のとき)はそのことを強調して

とも表記する。
弧長パラメーターによる表示
Cを弧長パラメーターでと表すと、 Cに沿った線積分は、

と表記できる。 すでに示したように

が恒等的に成り立つので、内積

は  をCのx(s)での接線方向の射映である。
をCのx(s)での接線方向の射映である。
すなわち線積分は、ベクトル場Xの、 Cの接線方向成分を積分したものである。
スカラー場の面積分
定義
3次元ユークリッド空間内の曲面Sが

とパラメトライズされていたとする。このとき、スカラー場FのS上での面積分を

により定義する。
Sのパラメーターを

と変数変換しても、この変数変換がSの向き付けを変えないなら、すなわちヤコビアン

が恒等的に成り立つなら、面積分の値は替わらないことを容易に示せる。
そこでFのS上での面積分を

とSのパラメトライズの方法によらない形で表記する。
1の面積分

はSの面積に等しい事が知られており、従って  は面積の微小量を表していると考えられる。このの事を面素という。
は面積の微小量を表していると考えられる。このの事を面素という。
Sが閉曲面のときはそのことを強調して、面積分の事を

とも表記する。
ベクトル場の面積分
向き付けられた曲面S上の点PにおけるSの流さ1の法線(単位法線)をnPとする。なお、 PにおけるSの単位法線は2本あるが、そのうちSの向きとnPが右手系になるものをnPとする。
このとき、ベクトル場XのS上での面積分を

により定義する。
Sが
とパラメトライズされている場合、面積分の定義から、

である。積分内はベクトル3重積であるので、

でもある。
勾配、回転、発散
定義
Fをスカラー場とするとき、Fの勾配 gradFをベクトル場

により定義する。
さらにベクトル場Xの回転 rot X、発散 div Xをそれぞれベクトル場


により定義する。
微分演算子ナブラ を
を

と定義すると、勾配、回転、発散は



と表記できる。
ストークスの定理とガウスの定理
勾配、回転、発散と線積分、面積分は以下の関係を満たす。ここでF、Xはそれぞれ3次元ユークリッド空間上のスカラー場とベクトル場、C、S、Vは3次元ユークリッド空間内の有界な曲線、曲面、および3次元領域で、「∂」は境界を表し、P、QはそれぞれCの始点と終点を表す。

 ((ケルビン・)ストークスの定理)
((ケルビン・)ストークスの定理) (ガウスの発散定理)
(ガウスの発散定理)
1パラメーター変換
発散divの幾何学的意味を見るため、ベクトル場の1パラメーター変換という概念を導入する。
Xを3次元ユークリッド空間上のベクトル場とし、xをの点とする。
Φu(x)を以下のように定義する:
 をベクトル場Xに沿ってuだけ進んだ点、すなわち
をベクトル場Xに沿ってuだけ進んだ点、すなわち
が全てのu' ∈[0,u]に対して成り立つ点とする。
このようなΦu(x)は全ての(x,u)に対して定義できるとは限らないが[注 2]、xの近傍Uとε>0を十分小さく選べば、任意のx' ∈Uと任意のu' ∈[0,ε]に対してこのようなΦu(x' )を定義できることが知られている。このような写像Φuをベクトル場Xの1パラメーター変換という。
発散divの幾何学的意味
1パラメーター変換をもちいると、発散divを幾何学的に意味づける事ができる。 Φu(x' )を成分で y1(x' ), y2(x' ), y3(x' ), と書くことにすると、体積要素はヤコビアンを用いて

という関係式を満たす。すなわち、 Φuは点xにおいて微小体積を体積比

で変換する写像である。
ヤコビの公式より、

ここで、 はAの余因子行列である。 Φ0は恒等写像なので、Iを単位行列とすると、1パラメーター変換の定義より、
はAの余因子行列である。 Φ0は恒等写像なので、Iを単位行列とすると、1パラメーター変換の定義より、

すなわち、div Xは 微小体積の1パラメーター変換による変化率を表している。
ポアンカレの補題とポテンシャル
簡単な計算により、任意のスカラー場Fと任意のベクトル場Xに対し


が恒等的に成立する事が簡単な計算により確認できる。
また3次元ユークリッド空間上では次が成立する(ポアンカレの補題):
 が恒等的に0
が恒等的に0  となるφが存在する
となるφが存在する が恒等的に0
が恒等的に0  となるAが存在する
となるAが存在する
このようなφ、Aが存在するとき、φ、AをそれぞれXのスカラー・ポテンシャル、ベクトル・ポテンシャルという。
なお、ポアンカレの補題が成り立つのはユークリッド空間では1次以上のコホモロジー(ド・ラームコホモロジー)が消えている事と関係しており、一般の多様体では必ずしもこの補題は成り立たない。
スカラー・ポテンシャル、ベクトル・ポテンシャルとも、存在する場合には一意ではない。しかし、φ1、φ2を同一のベクトル場Xのスカラー・ポテンシャルとするとき、

である事が容易に示せる。
またA1、A2を同一のベクトル場Xのスカラー・ポテンシャルとするとき、

を満たす Fが必ず存在する。 実際、ベクトル・ポテンシャルの定義より、

なので、ポアンカレの補題より

となるFが存在する。
歴史
現代の学校教育では古典力学の導入からベクトルを用いた物理教育が行われ、数学でも幾何ベクトル・線型代数学・ベクトル解析といったベクトルの概念が普通に教えられている。しかし古典力学の登場と同時にベクトルも誕生したのではなく、物理法則などを表記するために19世紀に生まれ[1]、20世紀になり高次元ベクトル場にまで一般化された。
ベクトルが誕生するまでは直交座標系を用いた解析幾何学やウィリアム・ローワン・ハミルトンが考案した四元数を用いた記法が主流であり、力学・電磁気学の教育・研究でも解析幾何学的な多変数微積分学を用いた力学や四元数表記の電磁気学が普通であった[1]。余談だが、同じようにベクトルを扱う数学理論である線型代数も登場時期はほぼ同じであり、こちらは完成が遅れたため教育に本格的に導入されるのは20世紀後半、数学教育の現代化が言われ出した頃である。20世紀前半は教えられている物理数学が現代とは違っていたのであり、ベクトルは数学ではなく物理学の授業で導入され、行列式が先に教えられていたし[2]、行列を用いて量子力学を定式化したヴェルナー・ハイゼンベルクも線型代数を習っていなかった。日本でも明治初期の物理教育では、四元数に基づく電磁気学が教えられていたことは有名である。
ベクトルを初めて教育に導入したのはウィラード・ギブスとされ、1880年代のイェール大学の講義で記号こそ現代とは違うものの、外積・内積やベクトル解析の概念などが当時使われていたが、イギリスの四元数の著書もある物理学者ピーター・ガスリー・テイトの評判も大変不評であったという[1]。今日用いられている記号や専門用語の大半は1901年に出版されたギブスとエドウィン・ウィルソン(英語版)の共著『ベクトル解析』によって確立された。
しかし、ギブス以降の物理学の教育ではベクトルは四元数を推進していたハミルトンやテイトのいたイギリスにおいて寧ろ盛んに用いられるようになり、物理学における常識的な概念となった[1]。(イギリスのオリヴァー・ヘヴィサイドの存在が影響していると考えられる。)しかしながら20世紀に入ってからはむしろスピン角運動量などの概念も四元数に非常に類似しており、ハミルトンには先見性があったのではないかとされる[1]。
関連概念
脚注
[脚注の使い方]
注釈
- ^ ここでは話を簡単にするためパラメーターsの原点をCの始点にしたが、C上の任意のん一点を原点としてよい。この場合、原点より始点側は負の値でパラメトライズする。
- ^ 例えば、 u→1のときΦu(x)→∞となれば、1以上のuに対して Φu(x)を定義できない。
出典
- ^ a b c d e 湯川秀樹 『物理講義』、1975年、講談社、58-62頁
- ^ 銀林浩、『線型代数学序説』、現代数学社、2002年 まえがきより
参考文献
- H・K・ニッカーソン、D・C・スペンサー、N・E・スティーンロッド著、原田重春・佐藤正次訳『現代ベクトル解析』、岩波書店、1965年、ISBN 4-00-005293-4 C3041
- 岩堀長慶、『ベクトル解析 ―力学の理解のために―』、裳華房、〈数学選書2〉、1960年。 ISBN 978-4-7853-1302-9
関連項目
|
|---|
|
|
 ポータル・ ポータル・ カテゴリ カテゴリ |
典拠管理データベース: 国立図書館  | |
|---|





 ポータル・
ポータル・




