マーズ2020
| マーズ2020 | |
|---|---|
 パーサヴィアランスとインジェニュイティ (想像図) | |
| 所属 | アメリカ航空宇宙局 (NASA) / ジェット推進研究所(JPL) |
| 公式ページ | Mars 2020 |
| 国際標識番号 | 2020-052A |
| カタログ番号 | 45983 |
| 状態 | 運用中 |
| 目的 | 火星探査 |
| 観測対象 | 火星 |
| 打上げ場所 | ケープカナベラル空軍基地第41発射施設 |
| 打上げ機 | アトラスV 541型 |
| 打上げ日時 | 2020年7月30日午前7時50分(アメリカ東部夏時間) |
| 軟着陸日 | 2021年2月18日 午前15時57分(アメリカ東部標準時)[1] |
| テンプレートを表示 | |
マーズ2020(Mars 2020) は、アメリカ航空宇宙局 (NASA) 火星探査プログラムによるミッションであり、火星ローバー「パーサヴィアランス」と小型の火星ヘリコプター「インジェニュイティ」から構成される。2020年7月30日(11:50 UTC)に打ち上げられ[2]、2021年2月18日(20:57 UTC)に火星のジェゼロ・クレーターに着陸した。[3] [4]
パーサヴィアランスは、過去の火星に生命が存在できる環境があったのかの評価、過去に生命が存在した可能性はあるのかの評価、また生命の痕跡となりうる地質材料の採取を含む、太古の火星の宇宙生物学的環境を調査するとともに、地表の地質作用を調査する[5]。パーサヴィアランスは採取した岩石や土壌のサンプルを詰めたサンプルチューブを将来のマーズ・サンプル・リターン・ミッションによる回収に備え、火星地表に残してくる[5][6][7]。マーズ2020は、2012年12月4日にサンフランシスコで開催されたアメリカ地球物理学連合の秋季大会でNASAにより公表された[8]。パーサヴィアランスの設計は先代機のキュリオシティに基づいているが、種々の科学機器や、サンプル採取設備などが新たに開発され搭載されている。
マーズ2020は2020年7月の打ち上げウィンドウで火星に向けて打ち上げられた3番目のミッションであり、他の2つはアラブ首長国連邦のホープ(オービター)と中国の天問1号(オービター、ランダー、ローバー)である。いずれも2021年2月に火星に到着している。
概要
ミッションは、火星に過去には生命が存在できる環境があったのか、また過去に存在したかもしれない微生物の証拠、もしくはその痕跡(生命存在指標)を探す。ローバーには火星の岩石や土壌を採取するためのドリルアセンブリーが搭載されている。採取されたサンプルは将来のミッションが詳細な分析のために地球へと持ち帰るために、サンプルチューブへと詰められ密閉され、火星表面に放置される。またパーサヴィアランスは将来の火星有人探査への準備として、新しい着陸技術や火星の大気である二酸化炭素から酸素を作り出す装置、地下の水源を探すための装置、火星の気候・大気中の塵などを分析する装置の試験を行う。
火星着陸技術
ミッションはすでに実証に成功している技術を多く使うが、とりわけ火星への着陸(EDL: Entry, Descent, and Landing「突入・降下・着地」)には先代機のキュリオシティが用いたシステムを用いる。マーズ2020の着陸システムは、熱シールド、パラシュート、スカイクレーンと呼ばれる降下手順が用いられ、火星大気突入時の時速約20000 kmから時速2 kmまで減速される。最終的にはローバーがスカイクレーンから吊るされて降りてきて着陸し、スカイクレーンが飛び去りEDLが完了する。この着陸システムは、キュリオシティ以前のローバーに用いられていたシステムに比べ、より大きく重いローバーを正確な地点に着陸させることが出来る。マーズ2020では、危険度が高い地形を回避しより精密に着陸地点へ誘導するための技術(TRN: Terrain-Relative Navigation)が加えられている。
地表探査技術
パーサヴィアランスはコストとリスクを最小化するために先代機のキュリオシティに基づいて設計されている。パーザヴィアランスの長距離移動システムによって火星地表を5 kmから20 km移動することが可能になる。キュリオシティからの改善点としては車輪がより丈夫なデザインに変更されている。今回のミッションでは初めて、火星の岩石からコアサンプルを採取するためのドリルアセンブリーを搭載する。採取されたサンプルは将来のミッションが詳細な分析のために地球へと持ち帰るために、サンプルチューブへと詰められ密閉され、火星表面に放置される。
パーサヴィアランスは火星の大気である二酸化炭素から酸素を生み出すための実験装置(MOXIE: Mars Oxygen ISRU Experiment)を搭載する。この技術実証により、ミッションプランニングの観点から、将来の有人探査において宇宙飛行士の活動を支える、生命維持装置や輸送システムなどのデザインを改良することにつながることが期待される。またローバーは火星の天気や大気中の塵を観測するための装置(MEDA: Mars Environmental Dynamics Analyzer)を搭載し、これが火星の気候の1日を通してや、季節を通しての変化の理解に繋がり、将来の有人探査に置いて火星の天気を予測する技術に発展することが期待される。
宇宙機
火星探査車(パーサヴィアランス)
詳細は「パーサヴィアランス」を参照
パーザヴィアランスはキュリオシティとデザインが似ているため、キュリオシティの設計チームの助けを借りて開発された。火星での探査中に亀裂が生じたキュリオシティの車輪はデザイン変更され、パーサヴィアランスの車輪は厚く丈夫なアルミ製となっている。走行性能向上のため車輪の直径は大きくなり(パーサヴィアランス: 52.5 cm、キュリオシティ: 50 cm)、幅はやや狭くなった。車輪は滑り止めの溝で覆われており、チタン製のスポークでハブに固定されている。パーサヴィアランスの重量(1025 kg)は、科学機器ペイロードの増加と、新たに搭載されたサンプル採取設備により、キュリオシティの重量(899 kg)よりも14%増加している。サンプル採集設備はロボットアーム、タレット、ACA(Adaptive Caching Assembly)から構成される。ロボットアームは5自由度であり、全長は 2.1 mである。手先に付いたドリルアセンブリー(タレット)との組み合わせにより、サンプルを採取したり、分析を行う。タレットにより採取されたサンプルはローバー内部にある複雑な向上のようなシステム(ACA)へと受け渡され、ACAがサンプルをチューブへと詰め、検査し、密封し格納、最終的には火星地表に置く。パーサヴィアランスにはキュリオシティの予備品であった放射性同位体熱電気転換器(MMRTG: Multi-Mission Radioisotope Thermoelectric Generator) が用いられており、ローバーに電力を供給する。供給電力は探査機打ち上げ時で110Wであり、時間が経過するに連れ、徐々に低下する。2つのリチウムイオン電池が電源として搭載されており、ローバーの使用電力がMMRTGの供給電力を超える際にも活動を継続することが出来る。
火星ヘリコプター(インジェニュイティ)
詳細は「インジェニュイティ」を参照
インジェニュイティは小型火星ヘリコプターの飛行技術実証機である。ヘリコプターはローバーの腹部のシールド内に格納された状態で火星まで航行し、火星地表でローバーから展開される。飛行には自動制御を用い、通信はローバー後部に搭載されているヘリコプター用の通信装置と行う。
2021年4月19日にインジェニュイティの1度目の飛行試験が行われ、地表から推定で最大3 m上空まで上昇したことが確認された。地球以外の天体で物体の動力飛行に成功したのはこれが史上初である[9][10]。インジェニュイティはミッション初期に行われた30日間の試験期間中に5回飛行した。1回の飛行時間は最長117秒、飛行高度は3 mから10 mの間、飛行距離は最長266 mであった。
火星への飛行
2020年7月30日、火星探査車を搭載したロケット(アトラス V)がフロリダ州ケープカナベラルから打ち上げ[11]。打ち上げ後、宇宙船のシステムが最小限の機能のみ動く状態となるセーフモードに入った。これは地球の影に入った際、想定以上に機体が冷えたためで、影から出て温度が戻った後に復旧作業が行われた[12]。
着陸場所

(See also: 火星地図; 火星記念地図 / リスト)
( アクティブローバー • 非活性 • アクティブランダー • 非活性 • 将来 )

← Beagle 2 (2003)

Curiosity (2012) →
Deep Space 2 (1999) →

Rosalind Franklin rover (2023) ↓
InSight (2018) →

Mars 2 (1971) →
← Mars 3 (1971)
Mars 6 (1973) →
Polar Lander (1999) ↓
↑ Opportunity (2004)
← Perseverance (2021)
← Phoenix (2008)

Schiaparelli EDM (2016) →

← Sojourner (1997)
Spirit (2004) ↑
↓Zhurong (2021)

Viking 1 (1976) →
Viking 2(1976) →
ギャラリー
パーサヴィアランス 火星着陸(2021年2月18日)
パーサヴィアランスの着陸のビデオ映像と、ローバーのカメラ(左上)、スカイクレーンのカメラ(左下)、およびタッチダウンの数秒前の外部カメラからの映像。

マーズ・リコネッサンス・オービターに乗ってHiRISEによって捕らえられた、パラシュートが開いた状態でのEDL中期降下のパーサヴィアランス。

着陸後のローバーとEDLクラフトのコンポーネントの位置。ローバーは中央下、パラシュートとバックシェルは左端、降下ステージは左中央、熱シールドは右端で強調表示されている。

マーズパーサヴィアランスローバー–ジェゼロクレーターのオクティヴィア・E・バトラー着陸地点。(2021年3月5日)
着陸に成功した後、ローバーが撮影した最初の画像。
「パーサヴィアランス」ローバー2番目の火星の画像。
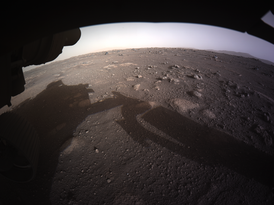
着陸後の「パーサヴィアランス」ローバーからの最初のカラー画像。

火星の「パーサヴィアランス」ローバー–着陸地点のパノラマビュー。(2021年2月18日)

インジェニュイティヘリコプターは、空中で5.0mから約85m離れたパーサヴィアランスローバー(左)を表示する。(2021年4月25日)

火星のパーサヴィアランスローバー、探査と研究のための可能なルート。
インジェニュイティヘリコプター

パーサヴィアランスの下から展開されているインジェニュイティ。

Sol 46の展開された「インジェニュイティ」。

高度1.2mでの最初のテスト飛行中のインジェニュイティの白黒写真。地面に影が写っている。

飛行中の高さ約5.2 mからインジェニュイティが撮影した火星の最初のカラー航空写真。
パーサヴィアランスから撮影した4回目のインジェニュイティ飛行のビデオ。(2021年4月30日)

5回目の飛行で飛行場Bに着陸するインジェニュイティ。(2021年5月7日)
パーサヴィアランスローバー測定機器
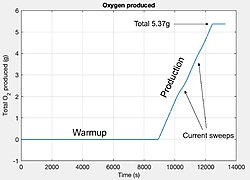
MOXIEの最初の火星酸素生成テストのグラフ。(2021年4月20日)
注釈
脚注
- ^ “Mars 2020 Mission, Perseverance Rover Launch”. Jet Propulsion Laboratory. 2020年6月24日閲覧。
- ^ “NASA, ULA Launch Mars 2020 Perseverance Rover Mission to Red Planet”. 2021年2月8日閲覧。
- ^ “NASA Mars 2020 Rover Gets a Landing Site: A Crater That Contained a Lake”. 2021年2月8日閲覧。
- ^ “Jezero Crater or Bust! NASA Picks Landing Site for Mars 2020 Rover”. 2021年2月8日閲覧。
- ^ a b “Call for Letters of Application for Membership on the Science Definition Team for the 2020 Mars Science Rover”. NASA. 2021年2月8日閲覧。
- ^ “Summary of the Final Report”. NASA. 2021年2月8日閲覧。
- ^ “Scientists Offer Wary Support for NASA's New Mars Rover”. 2021年2月8日閲覧。
- ^ “NASA announces plans for new $1.5 billion Mars rover”. 2021年2月8日閲覧。
- ^ “NASA's Ingenuity Mars Helicopter Succeeds in Historic First Flight”. NASA's Mars Exploration Proglam (2021年4月19日). 2021年4月20日閲覧。
- ^ Joe Palca (2021年4月19日). “Success! NASA's Ingenuity Makes First Powered Flight On Mars”. National Public Radio. 2021年4月20日閲覧。
- ^ “米NASA、火星探査車「パーサビアランス」を打ち上げ”. AFPBB News (2020年7月30日). 2020年7月31日閲覧。
- ^ “米火星探査車、打ち上げ後に技術的問題 NASA発表”. AFPBB News (2020年7月31日). 2020年7月31日閲覧。
関連項目
外部リンク
ウィキメディア・コモンズには、マーズ2020に関連するカテゴリがあります。
- 公式ウェブサイト (英語)
マーズ2020 | |||||||
|---|---|---|---|---|---|---|---|
| |||||||
| ペイロード |  | ||||||
| ローバー搭載機器 | |||||||
| 特徴 |
| ||||||
| 提案 着陸地点 |
| ||||||
| 関連 | |||||||
| |||||||
|---|---|---|---|---|---|---|---|
| 政策(英語版)と歴史 |
| ||||||
| 無人プログラム |
| ||||||
| 有人宇宙飛行 プログラム |
| ||||||
| 主なミッション(英語版) (無人・有人) |
| ||||||
| 通信と航法(英語版) |
| ||||||
| NASA関連の一覧 |
| ||||||
| |||||||


| ||||||
|---|---|---|---|---|---|---|
| フライバイ |
| |||||
| オービター |
| |||||
| ランダー |
| |||||
| ローバー |
| |||||
| 航空機 |
| |||||
| 計画段階 |
| |||||
| 構想段階 |
| |||||
| 関連項目 | ||||||
| ||||||







